[st]ZoomNet: Part-aware adaptive zooming neural network for 3D object detection [ZoomNet]
https://github.com/detectRecog/ZoomNet
Submitted on 9 Nov. 2019 17:50 by
Zhenbo Xu (University of Science and Technology of China)
| Running time: | | 0.3 s | | Environment: | | 1 core @ 2.5 Ghz (C/C++) |
| Method Description: | 3D object detection is an essential task in autonomous driv-
ing. Though recently great progress has been made, stereo
imagery-based 3D detection methods still lag far behind
lidar- based methods. Current stereo imagery-based
methods lack fine-grained instance analysis due to the lack
of annotations in KITTI and ignore the problem that distant
cars which oc- cupy fewer pixels in width face huge depth
estimation errors. To fill the vacancy of fine-grained
annotations, we present KITTI Fine-Grained car (KFG)
dataset by extending KITTI with an instance-wise 3D CAD
model and pixel-wise fine- grained annotations. Further, to
reduce the error of depth es- timation, we propose an
effective strategy named adaptive zooming by which distant
cars are analyzed on larger scales for more accurate depth
estimation. Moreover, unlike most methods which exploit
key-points constraints to infer 3D po- sition from 2D
bounding box, we introduce part locations as a generalized
version of key-points to better localize cars and to enhance
the resistance to occlusion. In addition, to better estimate
the 3D detection quality, the 3D fitting score is pro- posed
as a supplementary to the 2D classification score. The
resulting architecture, named ZoomNet, surpasses all
existing state-of-the-art by large margins on the popular
KITTI 3D detection benchmark. More importantly,
ZoomNet first reaches a comparable performance to
current lidar-based methods at a relatively lower threshold.
Though at a lower threshold, closing this gap indicates
that stereo camera, like we human’s eyes, is a suitable
alternative for expensive devices like depth camera or lidar.
Both the KFG dataset and our codes will be publicly
available. | | Parameters: | It is worth noting that our ZoomNet has surpassed SOTA on
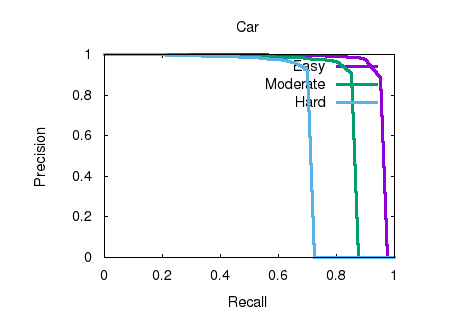
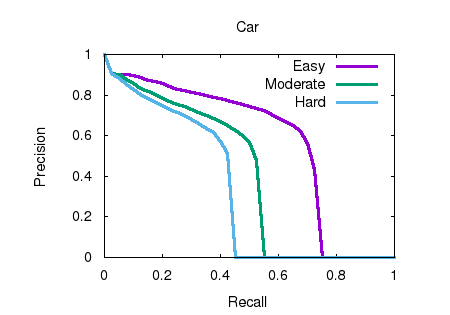
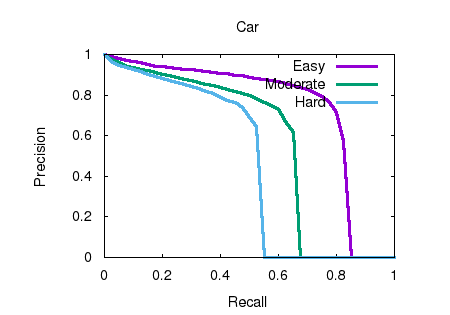
Bird-Eye's-view by large margins on the testing set.
ZoomNet Car 72.94 % 54.91 % 44.14 %
Pseudo-LIDAR 67.30 % 45.00 % 38.40 %
Stereo-RCNN 61.92 % 41.31 % 33.42 % | | Latex Bibtex: | @inproceedings{xu2020zoomnet,
title={ZoomNet: Part-Aware Adaptive Zooming
Neural Network for 3D Object Detection},
author={Z. Xu, W. Zhang, X. Ye, X. Tan, W. Yang, S. Wen, E.
Ding, A. Meng, L. Huang},
booktitle={Proceedings of the AAAI Conference on
Artificial Intelligence},
year={2020},
} |
|