Welcome

- For our research and teaching activities, visit our University of Tübingen website.
- You can follow me on GoogleScholar, YouTube and Bluesky.
- Pictures from our group activities can be found in our gallery.
- Mip-Splatting reconstructions of our group can be found here and here.
- If you like to join AVG, please carefully read our Application Guide.
- Our group maintains the popular Scholar Inbox paper recommender platform:

Prof. Dr.-Ing. Andreas Geiger
| Room 30-28/A24 | Tel: | +49 7071 29 70834 |
| Maria-von-Linden-Str. 6 | Email: | a.geiger@uni-tuebingen.de |
| 72076 Tübingen | Website: | https://uni-tuebingen.de/../autonomous-vision/ |
Assistant: Kerstin McGaughey
| Room 30-7/A21 | Tel: | +49 7071 29 70834 |
| Maria-von-Linden-Str. 6 | Email: | avg-admin@cs.uni-tuebingen.de |
| 72076 Tübingen | Website: | https://uni-tuebingen.de/../autonomous-vision/ |

Main Achievements
- Best Paper Award: CVPR 2024, CVPR 2021, 3DV 2017, 3DV 2015, GCPR 2015, Best Paper Honorable Mention: 3DV 2024, CVPR 2013
- Most influential CVPR papers: Differentiable Volumetric Rendering #15 in 2020, Occupancy Networks #14 in 2019, KITTI #1 in 2012 (source)
- Most influential ECCV papers: ConvOccNets #13 in 2020, TensoRF #2 in 2022 (source)
- Awards and Prizes: Sage 10-Year Impact Award 2024, Winner of nuPlan Challenge 2023, Longuet-Higgins Prize 2022, Mark Everingham Prize 2021, CS Teaching Award 2021, ERC Starting Grant 2019, IEEE PAMI Young Researcher Award 2018, Heinz Maier-Leibnitz Prize 2017, German Pattern Recognition Prize 2017
News
Tübingen AI Center
11.7.2025
Yesterday, the founding team behind scholar-inbox.com took home the Audience Award 🏆 and the Best Business Model Award 🏆!
Philipp Hühn and @markusflicke.bsky.social impressed everyone with a clear and engaging pitch of their smart recommender tool for academic papers.

Likes: 8 Reposts: 1 Replies: 1
Andreas Geiger
11.7.2025
Attending ICML 25 @icmlconf.bsky.social next week? Check out your personalized conference program at to know where to stop: www.scholar-inbox.com/conference/i...

Likes: 12 Reposts: 1 Replies: 0
Andreas Geiger
3.7.2025
I am very proud of my group! These are the nationalities of my current and past team members. Diversity is key.
🇩🇪 🇬🇷 🇮🇹 🇮🇳 🇷🇺 🇺🇦 🇨🇳 🇷🇸 🇯🇵 🇧🇪 🇺🇸 🇰🇷 🇹🇷
Likes: 49 Reposts: 1 Replies: 2
Andreas Geiger
2.7.2025
Last day of our AVG Summer retreat 2025 in Balderschwang! Many talks and for the first time 2 panel discussions and a PhD life hack session. And of course some sports,games,swimming and lots of fun..




Likes: 34 Reposts: 2 Replies: 0
Andreas Geiger
1.7.2025
Join us for our RealADSim Challenge! Closed-loop Driving in a 3DGS-based Simulator .. how cool is that? ;)
Yiyi Liao
30.6.2025
Likes: 5 Reposts: 0 Replies: 0
Andreas Geiger
30.6.2025
Scholar Inbox is featured on the ML for Science blog!
ML for Science
30.6.2025
Likes: 23 Reposts: 0 Replies: 1
Andreas Geiger
25.6.2025
Christina's new work PrITTI generates high-quality, controllable 3D semantic urban scenes in a compact primitive-based representation using a latent diffusion model. This enables applications like scene editing, inpainting, and photo-realistic street view synthesis!
raniatze.github.io/pritti/

Likes: 13 Reposts: 7 Replies: 0
Andreas Geiger
24.6.2025
Very happy that finally - after ~2 years of review - PanopticNERF-360 has been accepted to TPAMI :)
Panoramic 3D-to-2D Label Transfer in Urban Scenes. Kudos to the team and Yiyi Liao for leading the effort. Here is the project page: fuxiao0719.github.io/projects/pan...

Likes: 35 Reposts: 4 Replies: 0
Kashyap Chitta
17.6.2025
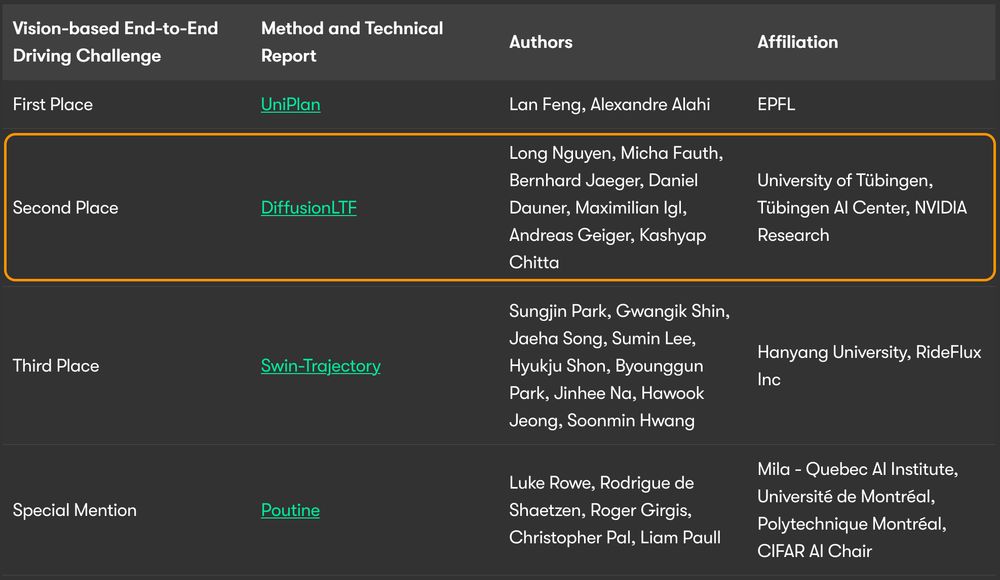
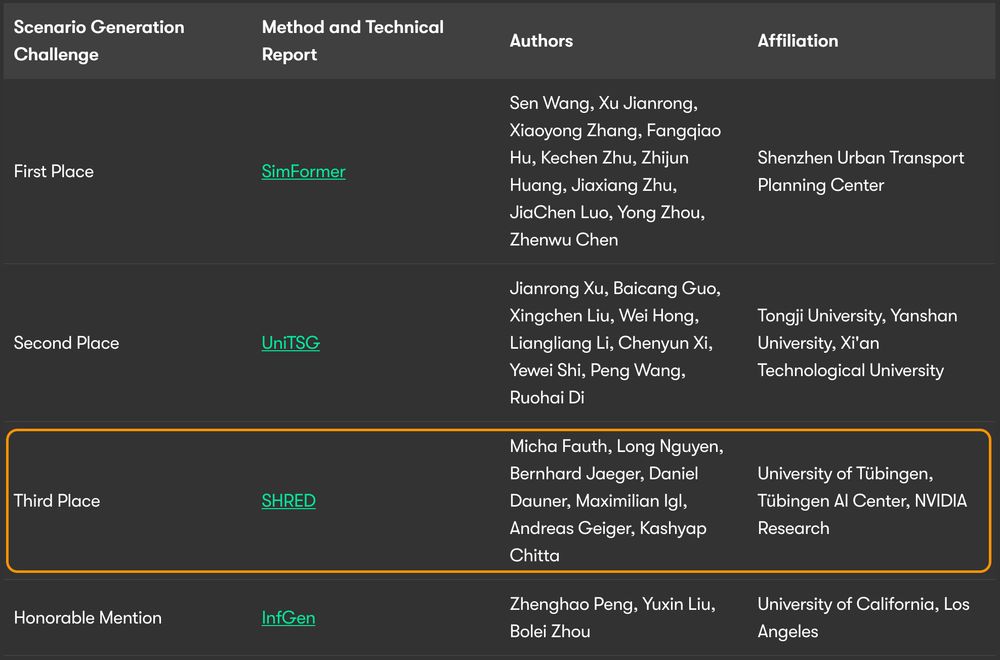
The 2025 Waymo Challenge results are out! We achieved second place in the End-to-End Driving Challenge with DiffusionLTF and third place in the Scenario Generation Challenge with SHRED. Our approaches prioritized simplicity, and we're preparing to make them publicly available soon.
Likes: 14 Reposts: 5 Replies: 1
Andreas Geiger
13.6.2025
Hooray! Shaofei's "Relightable Full-body Gaussian Codec Avatars" work neuralbodies.github.io/RFGCA/ is featured in this years SIGGRAPH 2025 Technical Papers Trailer! @acmsiggraph.bsky.social:
www.youtube.com/watch?v=HfHC...
 SIGGRAPH 2025 Technical Papers Trailer
SIGGRAPH 2025 Technical Papers TrailerLikes: 9 Reposts: 3 Replies: 0
Andreas Geiger
12.6.2025
How can we reliably simulate future driving scenarios under a wide range of ego driving behaviors? Check out: ReSim: Reliable World Simulation for Autonomous Driving
resim-world-model.github.io

Likes: 12 Reposts: 4 Replies: 0
Haofei Xu
5.6.2025
Excited to present our #CVPR2025 paper DepthSplat next week!
DepthSplat is a feed-forward model that achieves high-quality Gaussian reconstruction and view synthesis in just 0.6 seconds.
Looking forward to great conversations at the conference!
Andreas Geiger
24.4.2025
Likes: 27 Reposts: 7 Replies: 3
Kashyap Chitta
5.6.2025
🚗 Pseudo-simulation combines the efficiency of open-loop and robustness of closed-loop evaluation. It uses real data + 3D Gaussian Splatting synthetic views to assess error recovery, achieving strong correlation with closed-loop simulations while requiring 6x less compute. arxiv.org/abs/2506.04218

Likes: 21 Reposts: 10 Replies: 0
Andreas Geiger
5.6.2025
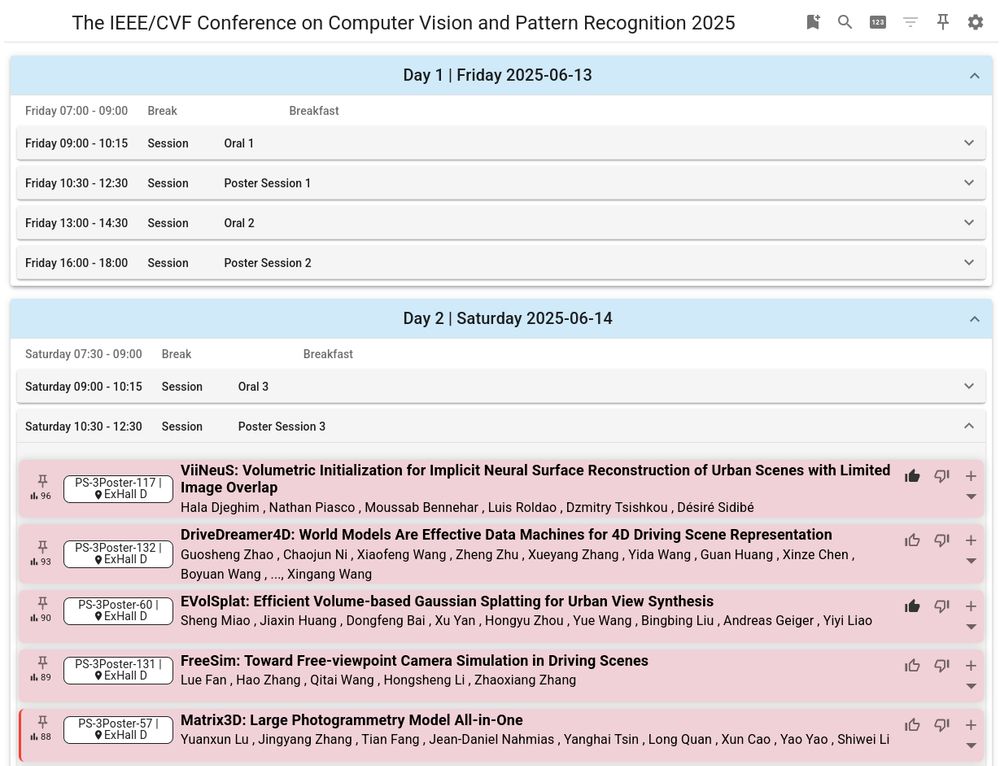
Your personalized CVPR 25 @cvprconference.bsky.social conference programs are now available for you!
www.scholar-inbox.com/conference/c...
Likes: 54 Reposts: 16 Replies: 1
Andreas Geiger
29.5.2025
While we mostly like to get rid of the steering wheel, sometimes we still need one. @bernhard-jaeger.bsky.social posting for a press release about his grant..

Likes: 16 Reposts: 0 Replies: 0
Andreas Geiger
24.5.2025
Many thanks to the Vector Stiftung vector-stiftung.de for funding our research on efficient scaling of reinforcement learning as part of their MINT innovation program! And big congratulations to @bernhard-jaeger.bsky.social for this success!

Likes: 13 Reposts: 1 Replies: 0
Andreas Geiger
16.5.2025
EMPERROR is a new generative perception error model for probing self-driving planners. It imitates modern 3D detectors, maintains temporal consistency, and reveals brittleness in IL-based planning - raising collision rates by up to 85%! #RA_L #robotics #AI - lasnik.github.io/emperror/
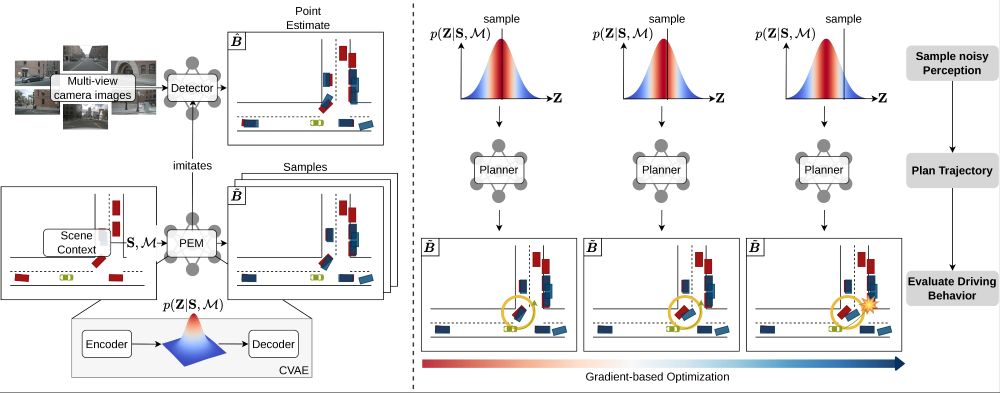
Likes: 8 Reposts: 4 Replies: 1
Andreas Geiger
13.5.2025
Congratulations to Dr. Christian Reiser for successfully defending his PhD work on 3D Representations for Real-Time Novel View Synthesis Based on Differentiable Rendering!
creiser.github.io

Likes: 29 Reposts: 0 Replies: 1
Andreas Geiger
9.5.2025
Congratulations to Dr. Stefan Baur for defending his PhD work on self-supervised Lidar scene flow, motion segmentation and object detection! baurst.github.io

Likes: 54 Reposts: 1 Replies: 0
Katrin Renz
8.5.2025
📣 Excited to share our #CVPR2025 Spotlight paper and my internship project @wayve: SimLingo.
A Vision-Language-Action (VLA) model that achieves state-of-the-art driving performance with language capabilities.
Code: github.com/RenzKa/simli...
Paper: arxiv.org/abs/2503.09594

Likes: 25 Reposts: 9 Replies: 1
Stefano Esposito
5.5.2025
📢 New paper CVPR 25!
Can meshes capture fuzzy geometry? Volumetric Surfaces uses adaptive textured shells to model hair, fur without the splatting / volume overhead. It’s fast, looks great, and runs in real time even on budget phones.
🔗 autonomousvision.github.io/volsurfs/
📄 arxiv.org/pdf/2409.02482

Likes: 27 Reposts: 20 Replies: 1
Andreas Geiger
30.4.2025
📣 New #CVPR25 Paper: UrbanCAD builds photorealistic and highly controllable hybrid digital twins from a single urban image and a large collection of 3D CAD models, supporting various editing operations. xdimlab.github.io/UrbanCAD/

Likes: 21 Reposts: 4 Replies: 0
Andreas Geiger
29.4.2025
🚗🌆 We introduce EVolSplat — a feed-forward 3D Gaussian Splatting model that enables real-time, photorealistic rendering without per-scene optimization.
Trained on KITTI-360 & Waymo, it sets a new SOTA for autonomous driving applications. #CVPR25. Paper & Code: xdimlab.github.io/EVolSplat/
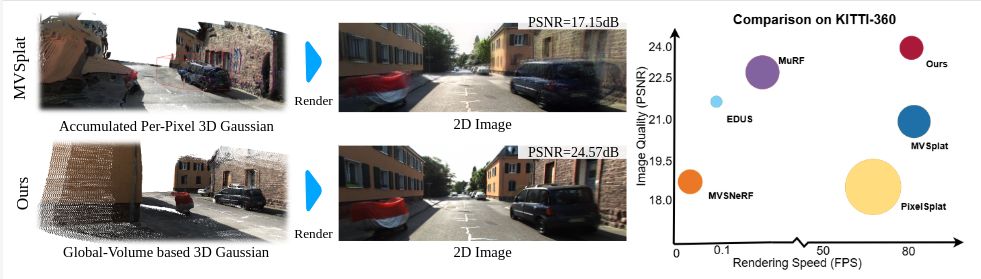
Likes: 24 Reposts: 5 Replies: 1
Bernhard Jaeger
28.4.2025
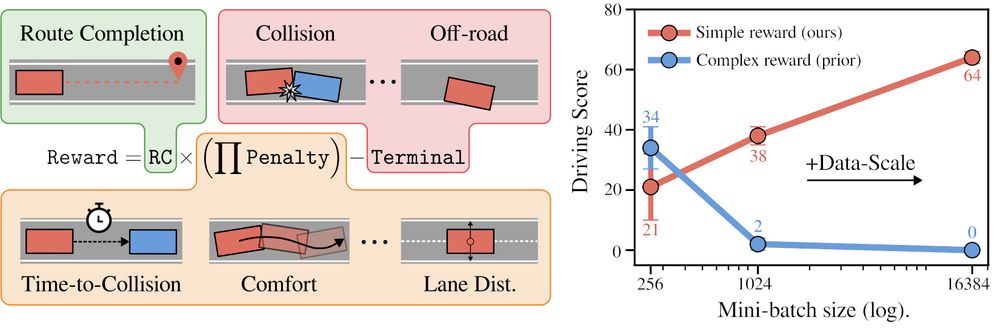
Introducing CaRL: Learning Scalable Planning Policies with Simple Rewards
We show how simple rewards enable scaling up PPO for planning.
CaRL outperforms all prior learning-based approaches on nuPlan Val14 and CARLA longest6 v2, using less inference compute.
arxiv.org/abs/2504.17838
Likes: 25 Reposts: 14 Replies: 0
Kashyap Chitta
28.4.2025
⏰ Heads up! The deadline for two #CVPR2025 Autonomous Grand Challenge tracks is May 10th, 2025:
1️⃣ NAVSIM v2 Challenge: huggingface.co/spaces/AGC20...
2️⃣ World Model Challenge by 1X: huggingface.co/spaces/1x-te...

Likes: 9 Reposts: 6 Replies: 1
Andreas Geiger
28.4.2025
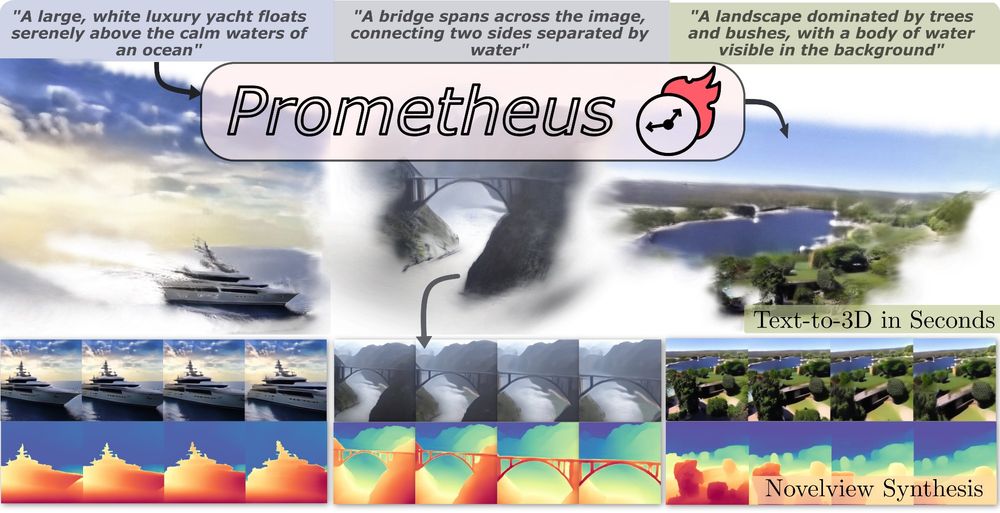
🔥 Prometheus: 3D-Aware Latent Diffusion for Feed-Forward Text-to-3D Scene Generation. Allows object- and scene-level generation from text in seconds.
freemty.github.io/project-prom...
Likes: 11 Reposts: 3 Replies: 0
Andreas Geiger
26.4.2025
Loft🆙 Learning a Coordinate-Based Feature Upsampler for Vision Foundation Models. We achieve SotA upsampling results for DINOv2. Paper and code:
andrehuang.github.io/loftup-site/

Likes: 28 Reposts: 3 Replies: 2
Andreas Geiger
25.4.2025
🔄 GenFusion bridges 3D reconstruction and generation with a reconstruction-driven video diffusion model. By closing the conditioning gap and fusing restoration frames in a loop, it improves view synthesis from sparse and masked inputs.
🔗 genfusion.sibowu.com
#CVPR2025

Likes: 9 Reposts: 2 Replies: 1
Andreas Geiger
24.4.2025
🏠 Introducing DepthSplat: a framework that connects Gaussian splatting with single- and multi-view depth estimation. This enables robust depth modeling and high-quality view synthesis with state-of-the-art results on ScanNet, RealEstate10K, and DL3DV.
🔗 haofeixu.github.io/depthsplat/

Likes: 39 Reposts: 13 Replies: 1
Andreas Geiger
23.4.2025
Personal programs for ICLR 25 @iclr-conf.bsky.social are now available at www.scholar-inbox.com. Enjoy!
Likes: 27 Reposts: 4 Replies: 0